1.1. Обзор конструкции блока
1.1.1. Общие сведения
Блок управления предназначен для защиты управляющей электроники от внешних воздействий, а также для правильной работы систем охлаждения, для организации всех электрических соединений и для защиты людей от поражения электрическим током. Блок управления поставляется в собранном состоянии. Разборка блока управления не допускается во избежание поражения электрическим током.
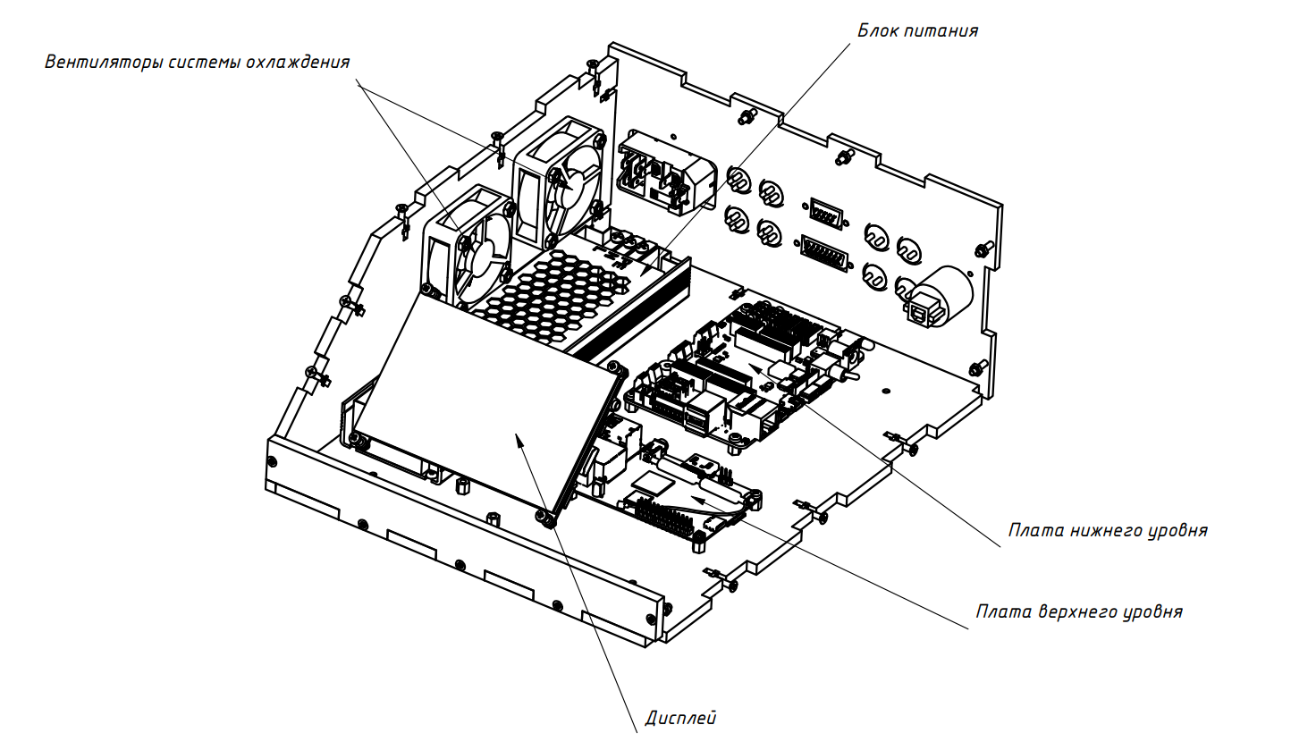
Блок управления включает в себя следующие конструктивные элементы:
Несущий корпус
Сборка управляющих плат
Дисплейный модуль
Блок питания
Вентиляторы системы охлаждения
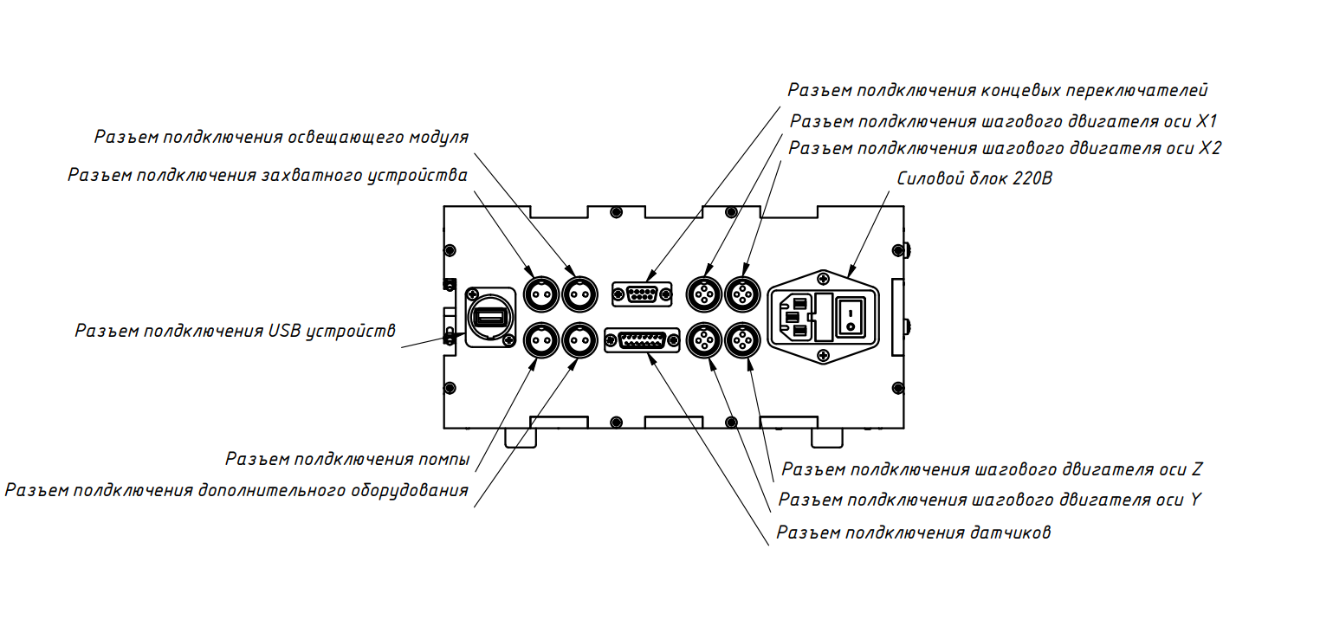
Разъемы подключения исполнительных механизмов и датчиков.
Силовой блок 220 вольт, который включает себя розетку, предохранитель и выключатель.
Расположение элементов в корпусе представлено на рисунках 1-2.
1.1.2. Блок питания
Блок питания предназначен для преобразования сетевого переменного напряжения 220 вольт в постоянное напряжение 12 вольт, необходимое для работы электроники агронабора. Преобразование напряжения 12 вольт в 5 вольт, которое необходимо для питания датчиков, дисплея и контроллера верхнего уровня выполняется платой контроллера нижнего уровня
1.1.3. Система охлаждения
Вентиляторы предназначены для отвода тепла от электронных компонентов, которые нагреваются во время работы. К таким компонентам относятся блок питания, драйвера шаговых двигателей и контроллер верхнего уровня.
1.1.4. Дисплей
Дисплейный модуль предназначен для отображения графического интерфейса контроллера верхнего уровня. Разрешение дисплея 800х480 пикселей, диагональ 5 дюймов. Дисплей оснащен сенсорной панелью, что позволяет пользователю взаимодействовать с интерфейсом.
1.1.5. Контроллеры
Сборка плат представляет собой платы контроллеров верхнего и нижнего уровней, соединенные электрически и механически. Подробнее о плате нижнего уровня рассказывается в части 2. Контроллер верхнего уровня — это одноплатный компьютер Raspberry PI 4B. Компьютер работает под управлением операционной системы Linux, что позволяет пользователю легко и быстро взаимодействовать с контроллером нижнего уровня, а также писать различные скрипты для управления всем агронабором. Также контроллер верхнего уровня может применяться для обновления программного обеспечения контроллера нижнего уровня.
1.1.6. Плата контроллера нижнего уровня
1.1.6.1. Общие сведения
Плата представляет собой контроллер нижнего уровня, то есть принимает команды от контроллера верхнего уровня и генерирует управляющие сигналы для исполнительных устройств, а также опрашивает датчики и передает данные с них на контроллер верхнего уровня в понятном ему виде.
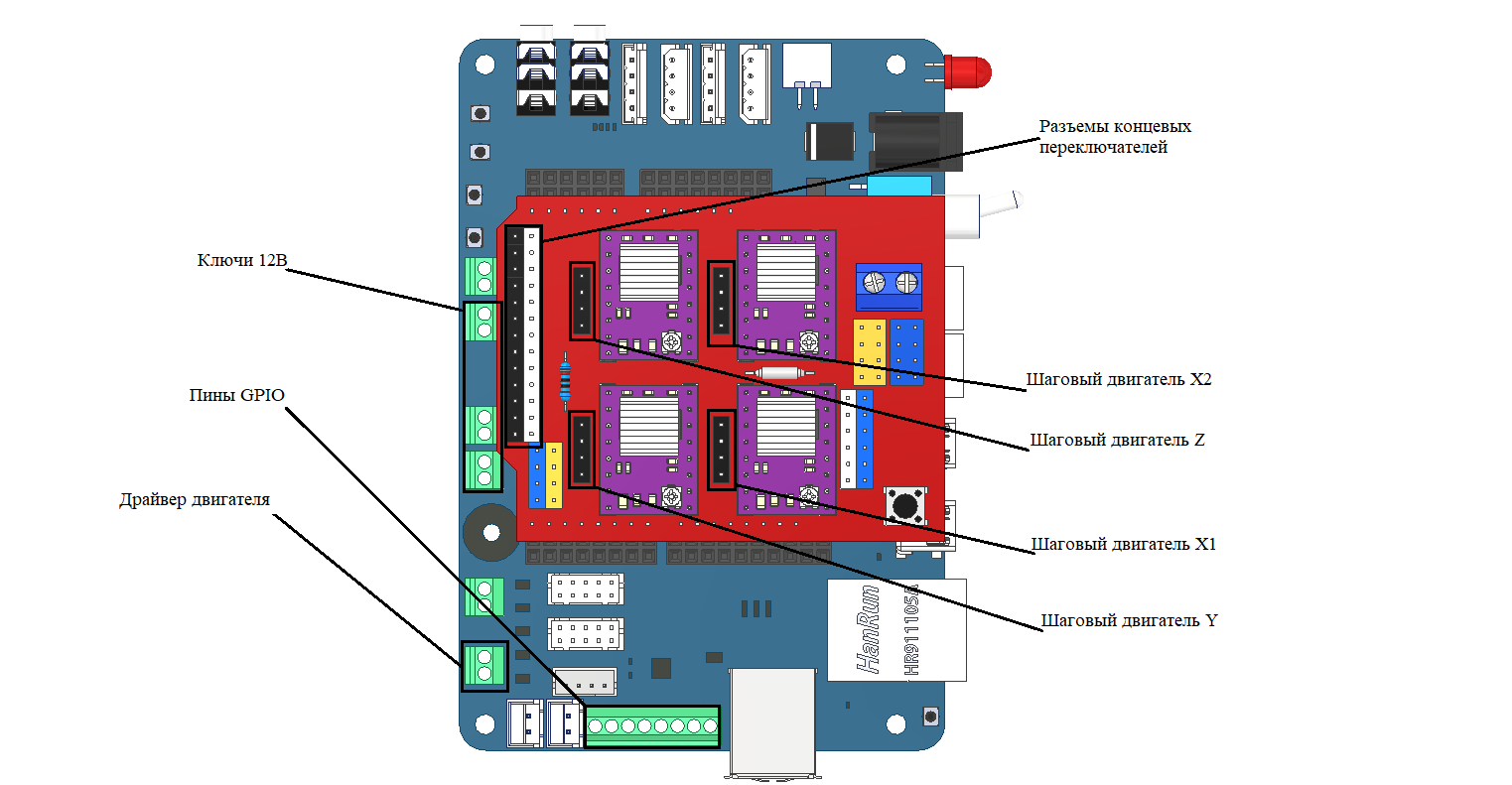
Плата включает в себя:
4 канала управления шаговыми двигателями
Канал управления коллекторным мотором
4 силовых выхода 12 вольт
3 канала концевых выключателей
5 входов/выходов общего назначения
USB-разъем подключения контроллера верхнего уровня
Группу разъемов для подключения платы управления шаговыми двигателями
Расположение основных элементов платы представлено на рисунке 1
Выводы общего назначения предназначены для подключения различных датчиков и исполнительных устройств, таких как светодиодные модули, пьезоизлучатели и прочие маломощные устройства.
Разъемы концевых выключателей — специальная группа разъемов, к которым подключаются концевые выключатели.
Выход на коллекторный мотор предназначен для управления маломощным коллекторным мотором, который применяется в захвате агронабора. Полярность выходного напряжения на этом разъеме может меняться для обеспечения реверса мотора. Для формирования напряжений на этом разъеме также применяется драйвер, и для управления им также требуется 2 сигнала — EN, IN. Сигнал EN аналогичен сигналу EN в драйверах шаговых двигателей, но этот сигнал можно использовать для управления скоростью вращения двигателя при помощи ШИМ. Сигнал IN отвечает за выбор направления вращения, выбирая значение между 1 или 0 – можно выбрать в какую сторону будет происходит вращение.
Управляемые выходы 12V предназначены для управления нагрузкой высокой мощности, например, светодиодной лентой, мотором помпы или лазером.
Разъем подключения контроллера верхнего уровня предназначен для подключения различных одноплатных компьютеров. Для связи контроллеров между собой применяется интерфейс USB.
1.1.7. Уровни манипулятора
Нижний уровень
Уровень оборудования (входов/выходов- Input/Output-level). Это уровень датчиков(sensors), измерительных устройств, контролирующих управляемые параметры, а также исполнительных устройств (actuators), воздействующих на эти параметры процесса, для приведение их в соответствие с заданием. На этом уровне осуществляется согласование сигналов датчиков с входами устройства управления, а вырабатываемых команд с исполнительными устройствами.
Средний уровень
Уровень управления оборудованием-Control level. Это уровень контроллеров (ПЛК-PLC, Programable Logic Controller). ПЛК получает информацию с контрольно-измерительного оборудования и датчиков о состоянии технологического процесса и выдает команды управления, в соответствии с запрограммированным алгоритмом управления, на исполнительные механизмы.
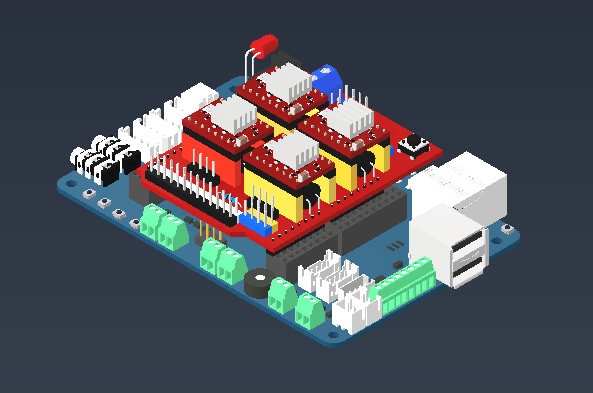
В наборе нижний и средний уровни объединены в сборке, состоящей из платы управления нижнего уровня и платы управления шаговыми двигателями. Сборка представлена на рисунке.
Верхний уровень
Уровень промышленного сервера, сетевого оборудования, уровень операторских и диспетчерских станций. На этом уровне идет контроль хода производства: обеспечивается связь с нижними уровнями, откуда осуществляется сбор данных, визуализациия и диспетчеризациия (мониторинг) хода технилогического процесса. Это уровень HMI, SCADA. На этом уровне задействован человек, т.е. оператор (диспетчер). Он осуществляет локальный контроль технологического оборудования через так называемый человеко-машинный интерфейс (HMI - Human Machine Interface). К нему относятся: мониторы, графические панели, которые устанавливаются локально на пультах управления и шкафах автоматики.
Для осуществления контроля за распределенной системой машин, механизмов и агрегатов применяется SCADA (Supervisory Control And Data Acqusition - диспетчерское управление и сбор данных) система. Эта система представляет собой порграммное обеспечение, которое настраивается и устанавливается на диспетчерских компьютерах. Она обеспечивает сбор, архивацию, визуализацию, важнейших данных от ПЛК. При получении данных система самостоятельно сравнивает их с заданными значениями управляемых параметров (уставками) и при отклонении от задания уведомляет оператора с помощью тревог(Alarms), позволяя ему предпринять необходимые действия. При этом система записывает все происходящее, включая действия оператора, обеспечивая контроль действий оператора в случае аварии или другой нештатной ситуации.
Таким образом, обеспечивается персональная ответственность управляющего оператора.
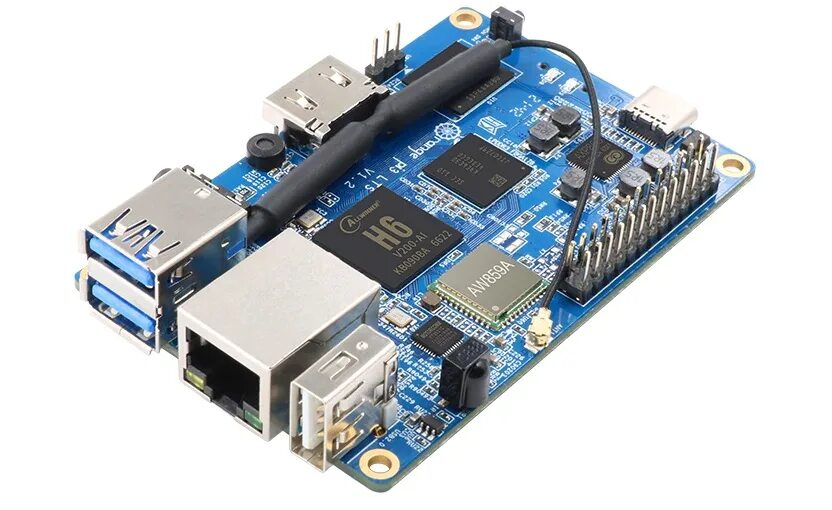
Контроллер верхнего набора представлен одноплатным компьютером Orange Pi 3 LTS, который показан на рисунке